A Raytracer in Python - Part 2 - Rendering Multiple Objects
A quick addition needed to the raytracer is providing freedom to add more objects to the rendering scene. In Part 1, the design was such that only one object, a sphere, could be drawn. The new code allows much more flexibility. I added a Plane object, introduced assignment of colors to the objects, divided the source into multiple files, and fixed a bug relative to rendering direction. Let's see more specifically.
The class World is the main interface to user programming of the raytracer. This small program creates and renders a scene containing four spheres, a white one in the origin, the others along the axes, each with different colors.
import raytrace
from raytrace import objects
w=raytrace.World()
w.add_object(objects.Sphere(center=(0.0,0.0,0.0),
radius=10.0,
color=(1.0,1.0,1.0)
)
)
w.add_object(objects.Sphere(center=(50.0,0.0,0.0),
radius=10.0,
color=(1.0,0.0,0.0)
)
)
w.add_object(objects.Sphere(center=(0.0,50.0,0.0),
radius=10.0,
color=(0.0,1.0,0.0)
)
)
w.add_object(objects.Sphere(center=(0.0,0.0,50.0),
radius=10.0,
color=(0.0,0.0,1.0)
)
)
w.render()
The resulting image is the following
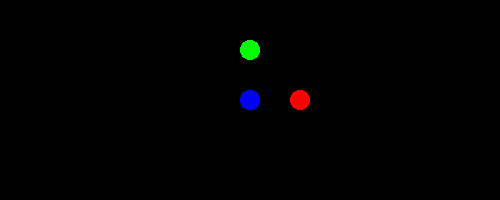
Clearly, the white sphere is not visible, as it's hidden by the blue sphere. This test allowed me to discover a problem with orientation: the green sphere was on the wrong side. I therefore had to analyze a bit the orientation and the different coordinate systems into play here
- The measure of the screen is given in pixels. We are used to this when it comes to screen size, for example. An image which is 320x200 means that it's 320 pixels wide (horizontal resolution) and 200 pixel high (vertical resolution). Don't fall into "thinking matrix", where NxM means N rows x M columns. It is the exact opposite.
- The geometry uses the cartesian system, which has the origin in the center of the picture. The x axis is oriented towards the right, the y axis towards the top, and the z axis towards the observer. This is not different from a traditional cartesian layout: for the z=0 plane, the top left pixel correspond to a (-,+) coordinate, the bottom right to a (+,-) coordinate. Points closer to the observer have positive z, honoring the right hand system. The camera in the above picture is at z=+100.0
- The raytracer uses pixel coordinates for the viewplane. Pixel 0,0 is at the bottom left. Changing the first index moves horizontally (along the row) from left to right. Changing the second index moves vertically (along the column) from bottom to top. As a consequence, the point at the bottom right is (hres-1,0), and at the top left is (o, vres-1). Note that this is equivalent to a cartesian (x,y) system with origin on the bottom left corner. Not a surprise, since there is a direct mapping between the pixels and the rays' origins.
- Finally, the pixel image indexing of pygame and PIL. For them, pixel 0,0 is top left. Like the case above, incrementing the first index also moves along the row from left to right. However, incrementing the second index moves vertically from top to bottom, which is the opposite of the raytracing index. Bottom left is (0, vres-1) and the bottom right is (hres-1, vres-1).
A remapping is therefore needed from the pixel coordinate of the rendering and the pixel coordinate of the display (e.g. pygame). The transformation is trivial, of course, but it must be kept into account, otherwise pics will be flipped horizontally.
Another interesting fact is that, according to "Ray Tracing from the ground up" it's useful to perform the raytracing operation starting from the bottom and working our way up, rendering pixels from left to right. According to them this is for coding symmetry and future convenience, so we stick to it.
Finding the foremost object
In the book, finding the foremost object is made more complex by the language used, C++. In python, you can use functional programming style to obtain the same in a very concise statement. The idea is to cast a ray, then go through all objects in the world to find the intersection point (if any) between the ray and the object. If more than one object is hit, the one with the intersection point closer to the observer commands the pixel color, since it's in front.
I achieve this with the following code
def hit_bare_bones_object(self,ray):
def f(o):
shadeRec = o.hit(ray)
if shadeRec:
return (shadeRec.parameter, o)
else:
return None
try:
foremost=sorted( \
filter(lambda x: x is not None, \
map(f, self.objects)
), key=lambda x: x[0]
)[0][1]
except IndexError:
return None
return foremost
What does this code do ? I defined a simple internal function f which accepts an object, performs the hit and returns a tuple containing the hit point position (as a parameter of the ray, so it's a single number, not a xyz coordinate) and the object.
Now, I use this function to map all the objects defined in the world. I will obtain a list with one entry per each object, either a None (not hit) or a 2-tuple containing the parameter and the hit object. I filter out the None entries, leaving only the 2-tuples and then sort according to their first element. The 2-tuple with the lowest parameter is now at index 0, and the [1] element of this tuple is the foremost object. At any time, the list may be empty (such as if you don't have any object, or no object is hit. In that case, a IndexError will be raised and that will indicate that the ray hit nothing. I may rework on this function later on, but for this second round, it suits my needs.
It's now time to move on to samplers. Given that the code is growing in size, I created a git repository you can clone from. The release of this post is available here. The code is under BSD license.